
A motor is a device that converts electrical energy into mechanical power, serving as the source of all movements of a robot.
If the chip is the brain and the reducer acts as the joints and bones of a robot, the motor is equivalent to muscles. It determines how powerful a robot is, how precise its movements are, and how fast it can respond.

I. Functions of Motors in Robots
Motors are responsible for driving wheel rotation, arm swinging, bending, walking, and object gripping.
They determine a robot’s torque, speed, positioning accuracy, operation stability, noise level and battery life.
A humanoid robot requires 20 to 40 motors working in coordination.
Each joint of an industrial robotic arm is equipped with an independent motor.
Each joint of an industrial robotic arm is equipped with an independent motor.
II. Five Most Common Types of Motors for Robots
1. Brushed DC Motor (Lowest Cost & Most Widely Used)
Working Principle: Power is supplied → commutation is realized via brush friction → the rotor rotates.
Advantages: Low cost, simple control, easy availability.
Disadvantages: Wear-prone brushes, short service life, electric spark generation and high noise.
Typical Applications: Toy robots, low-end mobile robots, low-cost servos.
Advantages: Low cost, simple control, easy availability.
Disadvantages: Wear-prone brushes, short service life, electric spark generation and high noise.
Typical Applications: Toy robots, low-end mobile robots, low-cost servos.
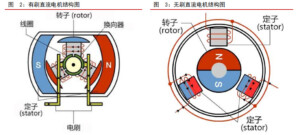
2. Brushless DC Motor (BLDC) — Mainstream Choice for Mid-to-High-End Products
Working Principle: Electronic commutation without brushes; position detected by Hall sensors.
Advantages: Long service life, high efficiency, low noise, high power output and low heat generation.
Disadvantages: Requires a dedicated driver; higher cost than brushed DC motors.
Typical Applications: Drones, AGV handling robots, service robot chassis, collaborative robot joints.
Advantages: Long service life, high efficiency, low noise, high power output and low heat generation.
Disadvantages: Requires a dedicated driver; higher cost than brushed DC motors.
Typical Applications: Drones, AGV handling robots, service robot chassis, collaborative robot joints.

3. Servo Motor — High-Precision Leader, Core Component of Industrial Robots
Working Principle: Closed-loop control system consisting of a motor, an encoder (position sensor) and a driver.
Advantages: Ultra-high positioning accuracy (up to ±0.01mm), stable speed, fast response and adjustable torque output.
Disadvantages: High cost, complex structure and sophisticated control system required.
Typical Applications: Industrial robotic arms, precision assembly robots, CNC machine tools.
Advantages: Ultra-high positioning accuracy (up to ±0.01mm), stable speed, fast response and adjustable torque output.
Disadvantages: High cost, complex structure and sophisticated control system required.
Typical Applications: Industrial robotic arms, precision assembly robots, CNC machine tools.

4. Coreless Motor — Dedicated for Dexterous Hands of Humanoid Robots
Structure: The rotor has no iron core, with the coil structured like a hollow cup.
Advantages:
Ultra-light and ultra-compact size, extremely fast response;
No iron core loss, high energy efficiency, stable low-speed operation and almost no jitter.
Disadvantages: Complex manufacturing process, high price, ultra-fine winding (wire diameter up to 0.02mm level).
Typical Applications: Fingers of humanoid robots, precision medical robots, micro robotic joints.
Advantages:
Ultra-light and ultra-compact size, extremely fast response;
No iron core loss, high energy efficiency, stable low-speed operation and almost no jitter.
Disadvantages: Complex manufacturing process, high price, ultra-fine winding (wire diameter up to 0.02mm level).
Typical Applications: Fingers of humanoid robots, precision medical robots, micro robotic joints.

5. Frameless Torque Motor — Preferred for Major Joints of Humanoid Robots
Structure: Consists only of annular stator and rotor without outer shell or bearings, directly embedded into robot joints.
Advantages:
Extra-large torque output at low speed;
Compact size, hollow wiring design, integrated structure and zero transmission backlash.
Disadvantages: Premium price, poor heat dissipation and high requirements for control algorithms.
Typical Applications: Hip, knee and shoulder major joints of humanoid robots, collaborative robot joints.
Advantages:
Extra-large torque output at low speed;
Compact size, hollow wiring design, integrated structure and zero transmission backlash.
Disadvantages: Premium price, poor heat dissipation and high requirements for control algorithms.
Typical Applications: Hip, knee and shoulder major joints of humanoid robots, collaborative robot joints.

III. Core Motor Parameters
- Torque (Nm): Represents power output; higher torque means stronger driving force.
- Rotational Speed (rpm): Determines the movement speed of robots.
- Power Density (W/kg): Reflects high power with lightweight design; a key indicator for humanoid robots.
- Response Time (ms): Stands for reaction speed; servo motors and coreless motors can achieve a response time below 5ms.
- Accuracy (° or mm): Defines the positioning precision of movements.
As the core power component in the midstream robotics industrial chain, motors directly set the performance ceiling of the entire robot system.