
Двигатель – это устройство, преобразующее электрическую энергию в механическую энергию., служащий источником всех движений робота.
Если чип — это мозг, а редуктор — суставы и кости робота, двигатель эквивалентен мышцам. Он определяет, насколько силен робот., насколько точны его движения, и как быстро он может ответить.

я. Функции двигателей в роботах
Двигатели отвечают за вращение ведущих колес., рука качается, изгиб, ходьба, и захват предметов.
Они определяют крутящий момент робота, скорость, точность позиционирования, стабильность работы, уровень шума и время автономной работы.
Гуманоидному роботу требуется 20 к 40 двигатели работают согласованно.
Каждый сустав промышленного робота оснащен независимым двигателем..
Каждый сустав промышленного робота оснащен независимым двигателем..
II. Пять наиболее распространенных типов двигателей для роботов
1. Матовый двигатель постоянного тока (Самая низкая стоимость & Наиболее широко используемый)
Принцип работы: Питание подается → коммутация осуществляется за счет трения щеток → ротор вращается..
Преимущества: Бюджетный, простое управление, легкая доступность.
Недостатки: Изнашиваемые щетки, короткий срок службы, образование электрической искры и высокий уровень шума.
Типичные применения: Игрушечные роботы, недорогие мобильные роботы, недорогие сервоприводы.
Преимущества: Бюджетный, простое управление, легкая доступность.
Недостатки: Изнашиваемые щетки, короткий срок службы, образование электрической искры и высокий уровень шума.
Типичные применения: Игрушечные роботы, недорогие мобильные роботы, недорогие сервоприводы.
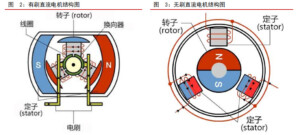
2. Бесщеточный двигатель постоянного тока (БЛДК) — Основной выбор для продуктов среднего и высокого класса
Принцип работы: Электронная коммутация без щеток; положение определяется датчиками Холла.
Преимущества: Длительный срок службы, высокая эффективность, низкий уровень шума, высокая выходная мощность и низкое тепловыделение.
Недостатки: Требуется специальный драйвер; более высокая стоимость, чем коллекторные двигатели постоянного тока.
Типичные применения: Дроны, Роботы-манипуляторы AGV, шасси сервисного робота, совместные роботизированные суставы.
Преимущества: Длительный срок службы, высокая эффективность, низкий уровень шума, высокая выходная мощность и низкое тепловыделение.
Недостатки: Требуется специальный драйвер; более высокая стоимость, чем коллекторные двигатели постоянного тока.
Типичные применения: Дроны, Роботы-манипуляторы AGV, шасси сервисного робота, совместные роботизированные суставы.

3. Серводвигатель — лидер высокой точности, Основной компонент промышленных роботов
Принцип работы: Замкнутая система управления, состоящая из двигателя, кодер (датчик положения) и водитель.
Преимущества: Сверхвысокая точность позиционирования (до ±0,01 мм), стабильная скорость, быстрый отклик и регулируемый выходной крутящий момент.
Недостатки: Высокая стоимость, требуется сложная структура и сложная система управления.
Типичные применения: Промышленные роботы-манипуляторы, прецизионные сборочные роботы, Станки с ЧПУ.
Преимущества: Сверхвысокая точность позиционирования (до ±0,01 мм), стабильная скорость, быстрый отклик и регулируемый выходной крутящий момент.
Недостатки: Высокая стоимость, требуется сложная структура и сложная система управления.
Типичные применения: Промышленные роботы-манипуляторы, прецизионные сборочные роботы, Станки с ЧПУ.

4. Бессердечниковый двигатель — для ловких рук роботов-гуманоидов
Структура: Ротор не имеет железного сердечника., с катушкой, имеющей форму полой чашки.
Преимущества:
Сверхлегкий и сверхкомпактный размер, чрезвычайно быстрый ответ;
Нет потери железного сердечника, высокая энергоэффективность, стабильная работа на низких скоростях и практически полное отсутствие джиттера.
Недостатки: Сложный производственный процесс, высокая цена, сверхтонкая намотка (диаметр проволоки до уровня 0,02 мм).
Типичные применения: Пальцы человекоподобных роботов, прецизионные медицинские роботы, микророботизированные суставы.
Преимущества:
Сверхлегкий и сверхкомпактный размер, чрезвычайно быстрый ответ;
Нет потери железного сердечника, высокая энергоэффективность, стабильная работа на низких скоростях и практически полное отсутствие джиттера.
Недостатки: Сложный производственный процесс, высокая цена, сверхтонкая намотка (диаметр проволоки до уровня 0,02 мм).
Типичные применения: Пальцы человекоподобных роботов, прецизионные медицинские роботы, микророботизированные суставы.

5. Безрамный моментный двигатель — предпочтителен для основных узлов роботов-гуманоидов.
Структура: Состоит только из кольцевого статора и ротора без внешней оболочки и подшипников., непосредственно встроен в суставы робота.
Преимущества:
Очень большой выходной крутящий момент на низкой скорости;
Компактный размер, полая конструкция проводки, интегрированная структура и нулевой люфт передачи.
Недостатки: Премиальная цена, плохой отвод тепла и высокие требования к алгоритмам управления.
Типичные применения: Бедро, коленные и плечевые суставы роботов-гуманоидов, совместные роботизированные суставы.
Преимущества:
Очень большой выходной крутящий момент на низкой скорости;
Компактный размер, полая конструкция проводки, интегрированная структура и нулевой люфт передачи.
Недостатки: Премиальная цена, плохой отвод тепла и высокие требования к алгоритмам управления.
Типичные применения: Бедро, коленные и плечевые суставы роботов-гуманоидов, совместные роботизированные суставы.

III. Параметры основного двигателя
- Крутящий момент (Н.м.): Представляет выходную мощность; более высокий крутящий момент означает более сильную движущую силу.
- Скорость вращения (rpm): Определяет скорость движения роботов.
- Плотность мощности (Вт/кг): Отражает высокую мощность и легкий дизайн; ключевой показатель для роботов-гуманоидов.
- Время ответа (РС): Означает скорость реакции; серводвигатели и двигатели без сердечника могут достигать времени отклика менее 5 мс..
- Точность (° или мм): Определяет точность позиционирования движений.
В качестве основного силового компонента в промышленной цепочке робототехники среднего сегмента., двигатели напрямую определяют потолок производительности всей робототехнической системы.